
Project Information
- Name: Warehouse Robotic Arm
- Date: 14 Apr 2023
- Goal: Automated Pick & Place
-
Tech Stack:
Arduino Servo Motors IR Sensors C++
Project Overview
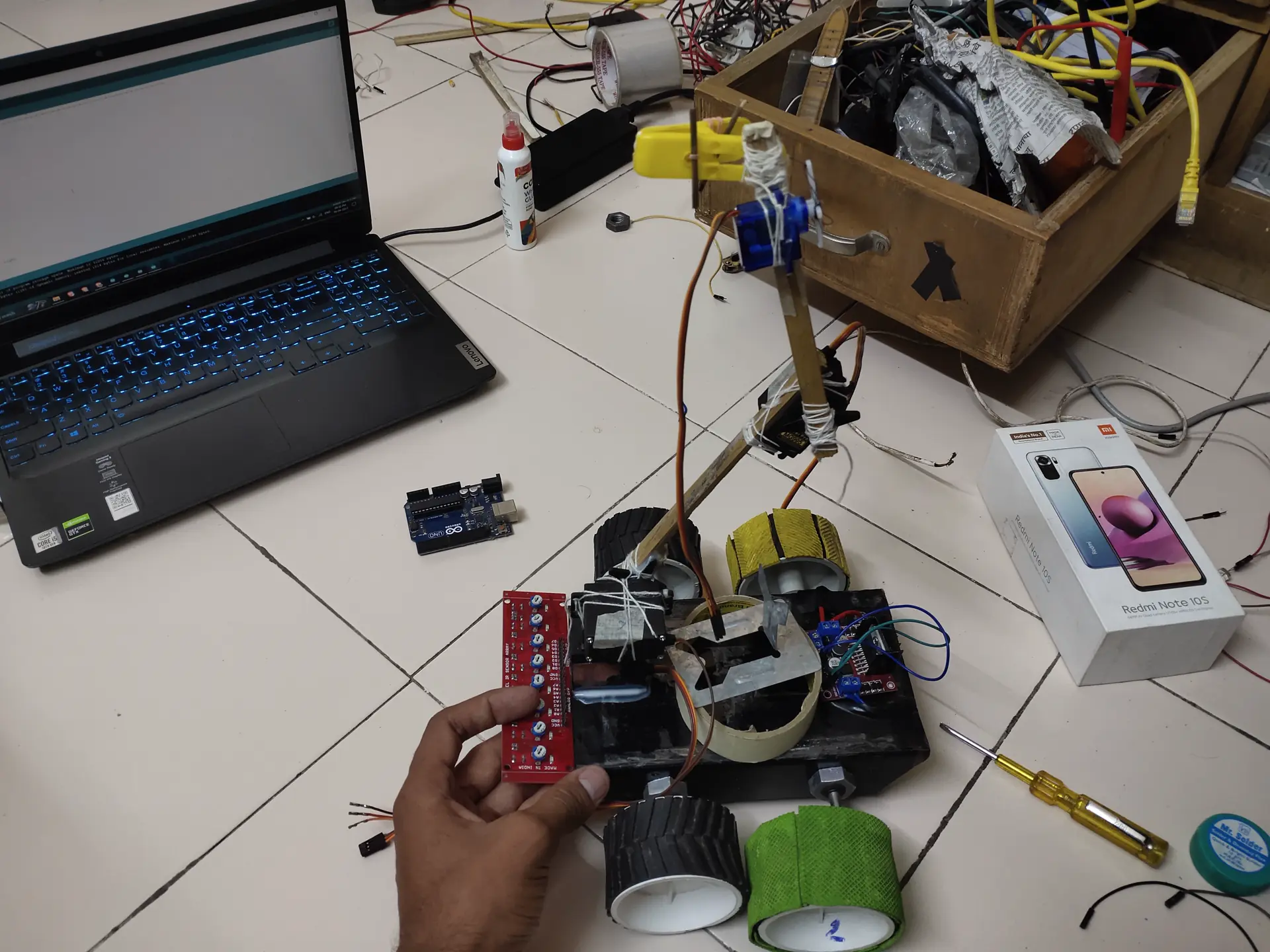
The objective was to develop a prototype bot capable of efficiently lifting heavy weights within a warehouse environment. The system was designed to be a hybrid, capable of being controlled by human operators for complex tasks, while utilizing line-following capabilities for autonomous navigation to reduce computational overhead.
Project Outcome
This project served as a significant learning experience in hardware integration. Ultimately, the project was paused due to component failures (faulty servos) and limited hardware availability at the time. However, the logic for navigation and arm kinematics was successfully implemented.
Media Gallery
Testing Arm Movement
Pick & Place Logic
Navigation Test